

7 year-old kids playing social game with two Kebbi robots
Background
After joining the Modeling and Informatics Lab under Professor Huang, Tsung-Ren at National Taiwan University, I assisted previous seniors in enhancing the Rapport project named An Exploration Study of Rapidly Human-Robot Rapport Through a Social Interaction Game (Mar 2024 - Jun 2024).
An Exploration Study of Rapidly Human-Robot Rapport Through a Social Interaction Game aimed to apply social robots in various fields by creating a game situation where participants were included by one robot while being excluded by another, allowing them to quickly establish rapport with one of the robots.
My Role
Here are my tasks to improve this project:
1. Adujst the interaction rate of included and excluded robots from approximately 1 : 9 to 7.5 : 2.5. This is because the original rate is too obvious for participants, and they didn’t think they were playing a “social game“.
2. Enhance the efficiency of controlling robots by improving the interface.
3. Doing pre-pilot on children to see the difference between previous adult participants.
Process
No-code design
Continuing using previous No-code tools to adjust the interaction rates between including robots and excluded robots
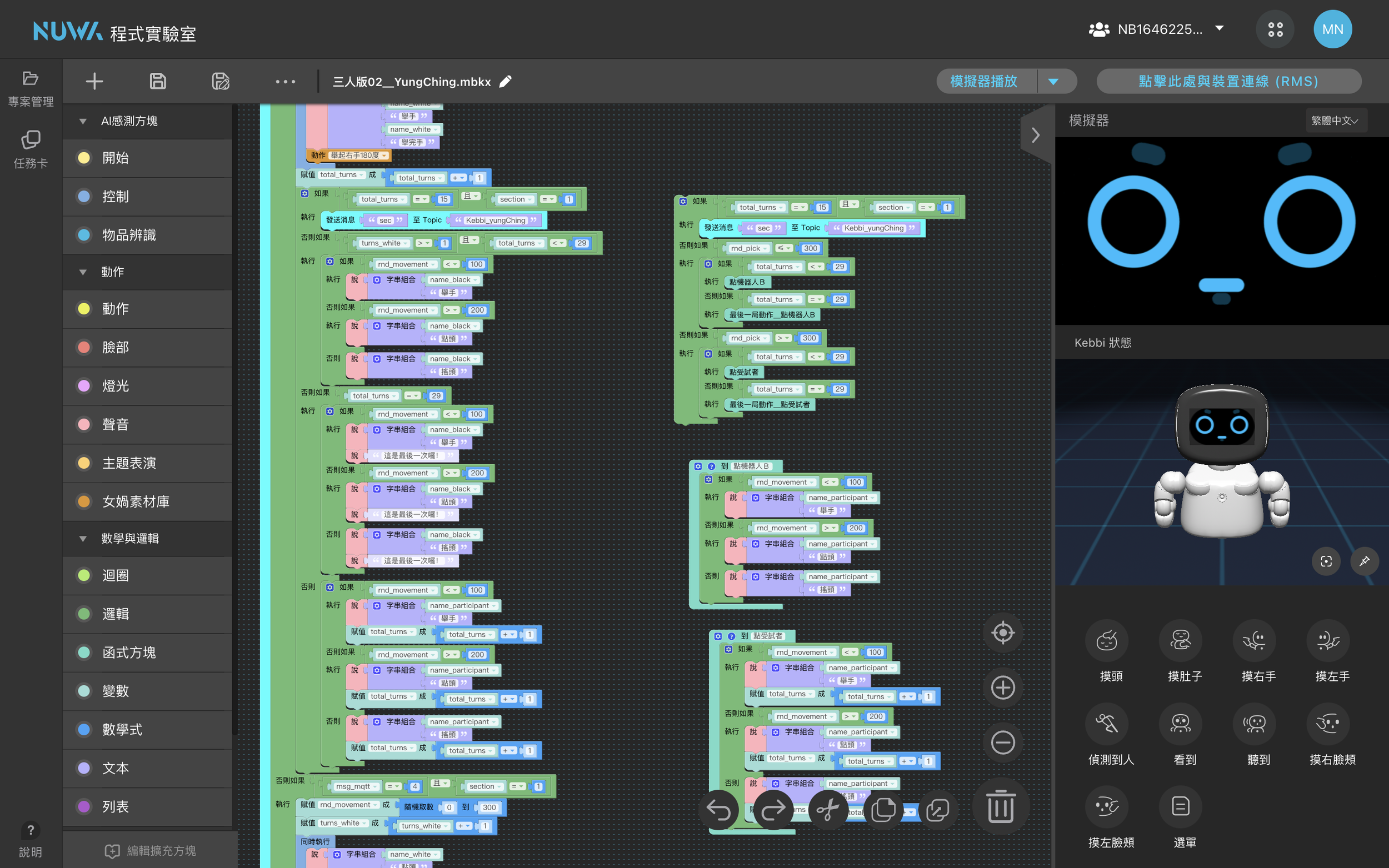
Using Nuwa Codelab
Simple HTML platform
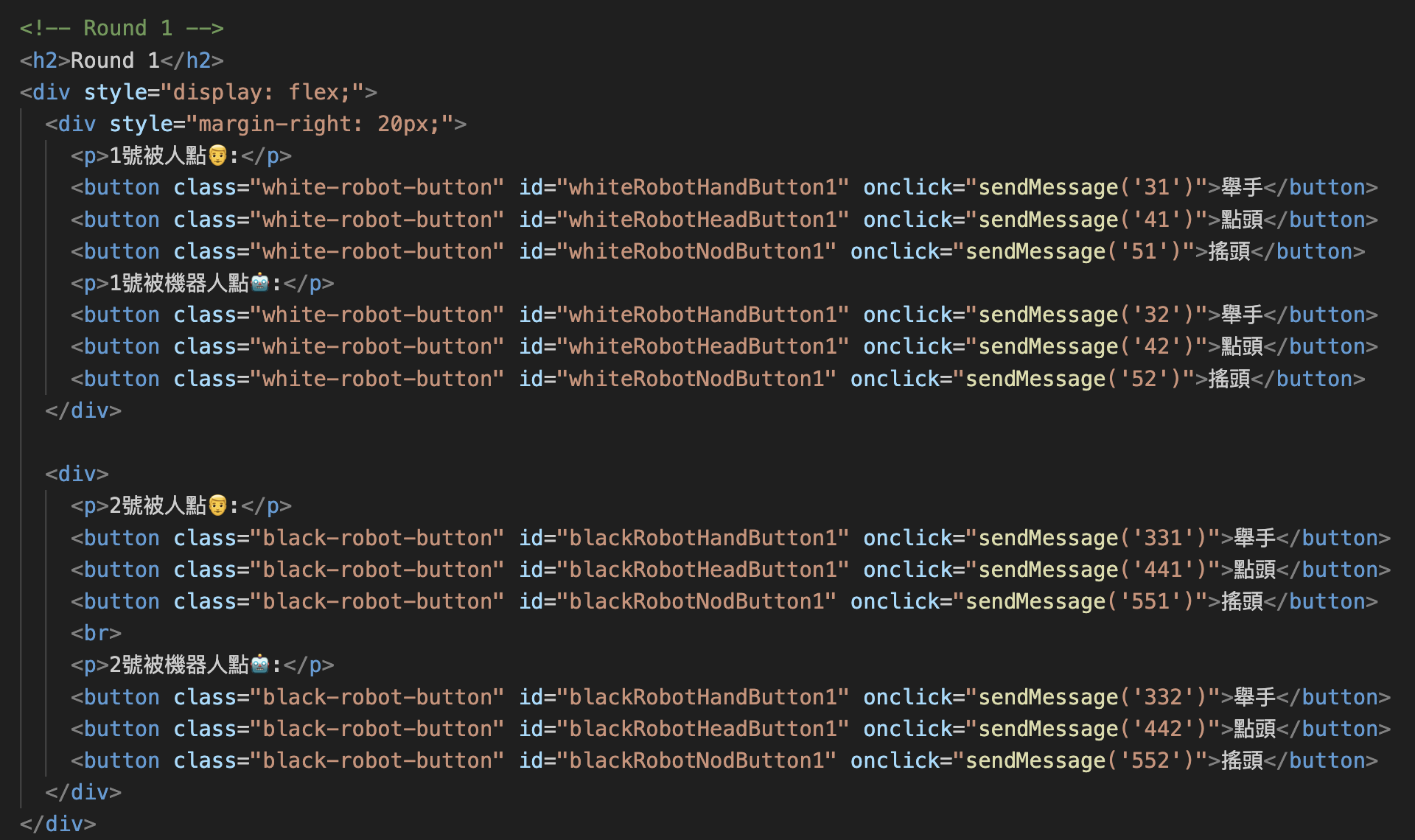
Button Code to send MQTT Messages
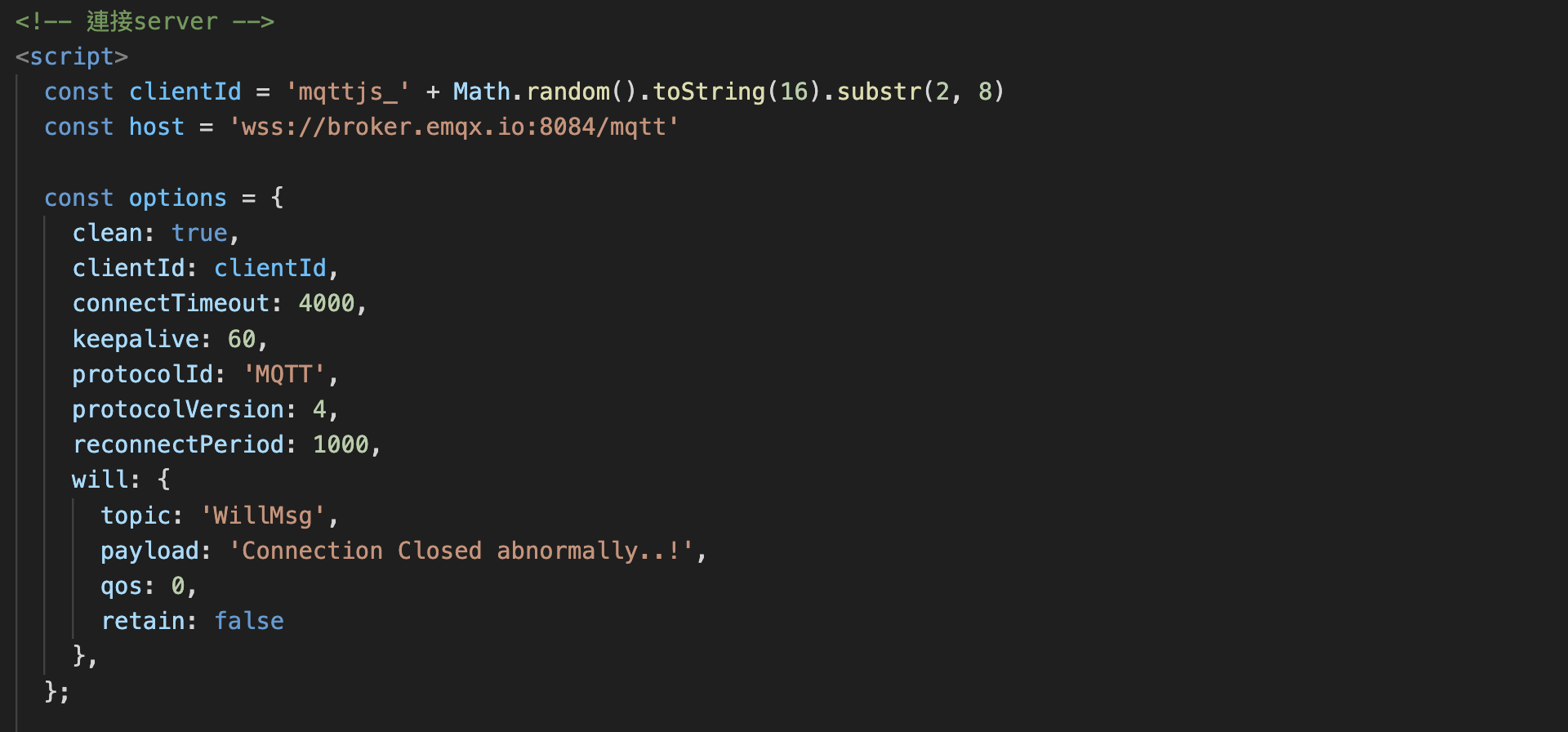
Code that connect to MQTT

Final HTML to control robots
Result
During the pre-pilot phase, I made the following key improvements:
Smooth Interaction Process: I reduced the robot’s response time from 5 seconds to 1 second, significantly improving the flow of interactions. This allowed children to stay engaged in the game without noticing any delays, creating a seamless experience.
Perception of Engagement: Even children were able to detect which robot interacted with them more frequently during the game. However, their preferences were unexpectedly influenced by the robots’ color, which provided insight into the impact of nonverbal cues on user experience.
Frequency and Trust: After testing with three children, all reported disliking the robot that interacted with them more frequently, even after I removed the color factor. This finding mirrored the results from adult participants, raising the question of why increased interaction in human-robot social games does not necessarily lead to greater trust or likability. This is an important topic for further research.
Reflection
This was my first project that required technical skills, and it pushed me to step outside my comfort zone. From adjusting the frequency of interaction using a no-code tool to investigating the factors that slowed down the interaction process, I took the initiative to self-learn server configurations and build a simple HTML interface to send MQTT messages. This not only improved the interaction efficiency but also made the process more user-friendly.
As someone without a technical background, I am particularly proud of my ability to tackle these challenges and see the solution come to life. This experience taught me the value of persistence and self-directed learning in problem-solving. Moreover, I realized that human-robot interaction requires customized designs and assistance for different user groups, such as children and adults. This discovery sparked my interest in exploring how diverse user needs can shape future human-robot interactions, highlighting the importance of deeper research in this area.